6 Routine operation
6.1 Prepare system
Instructions for starting the system are provided in chapter 4.
6.2 Fill boxes
Load boxes onto platform as described in section 5.2.
From the touchscreen menu select 1 Box or 2 Boxes depending on the number of boxes on the platform (figure 6.1). The robot will home to zero the cartesian coordinate system, and then commence filling the vials.
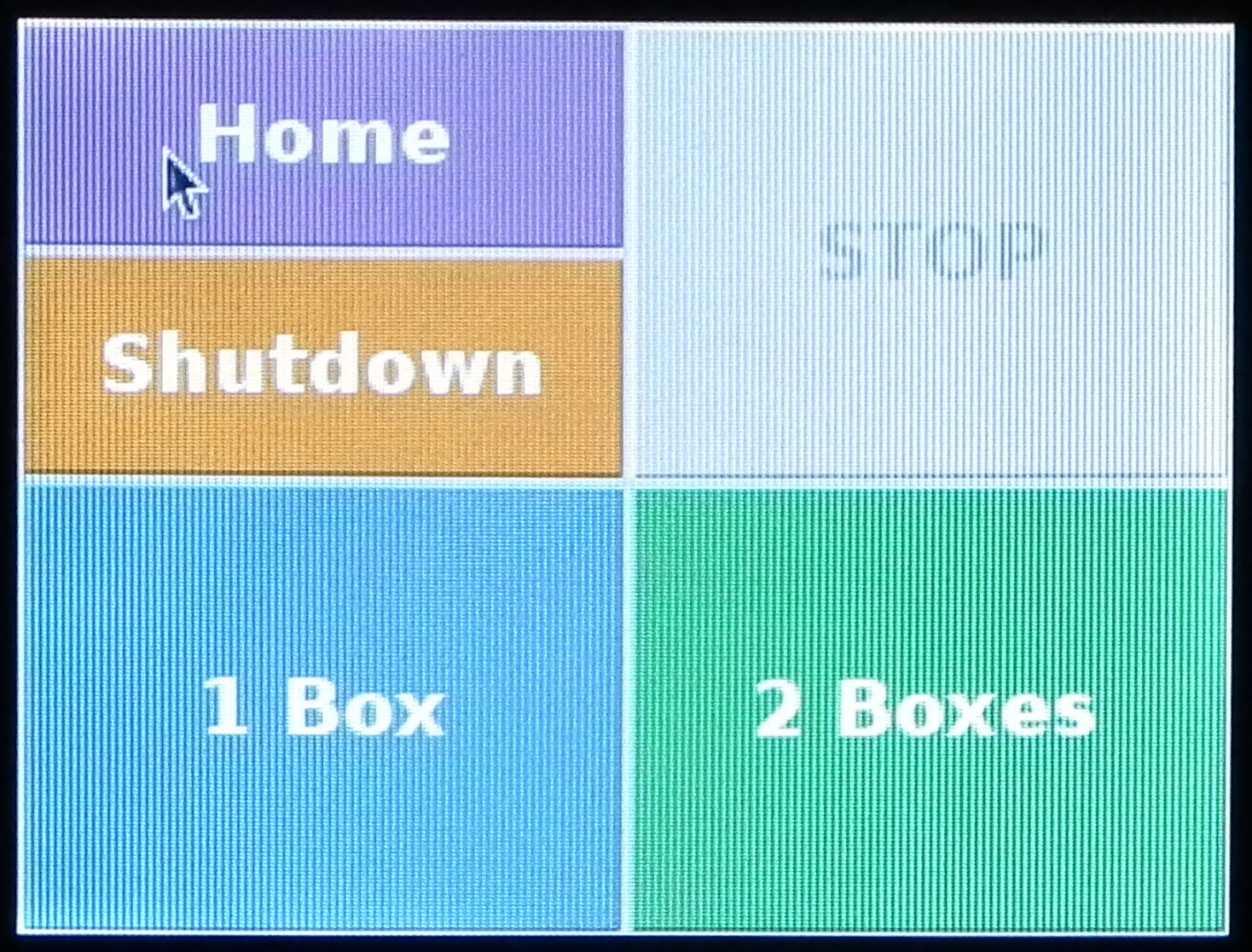
Figure 6.1: Touchscreen interface.
During filling the robot can be stopped by clicking on the Stop button (figure 6.2).
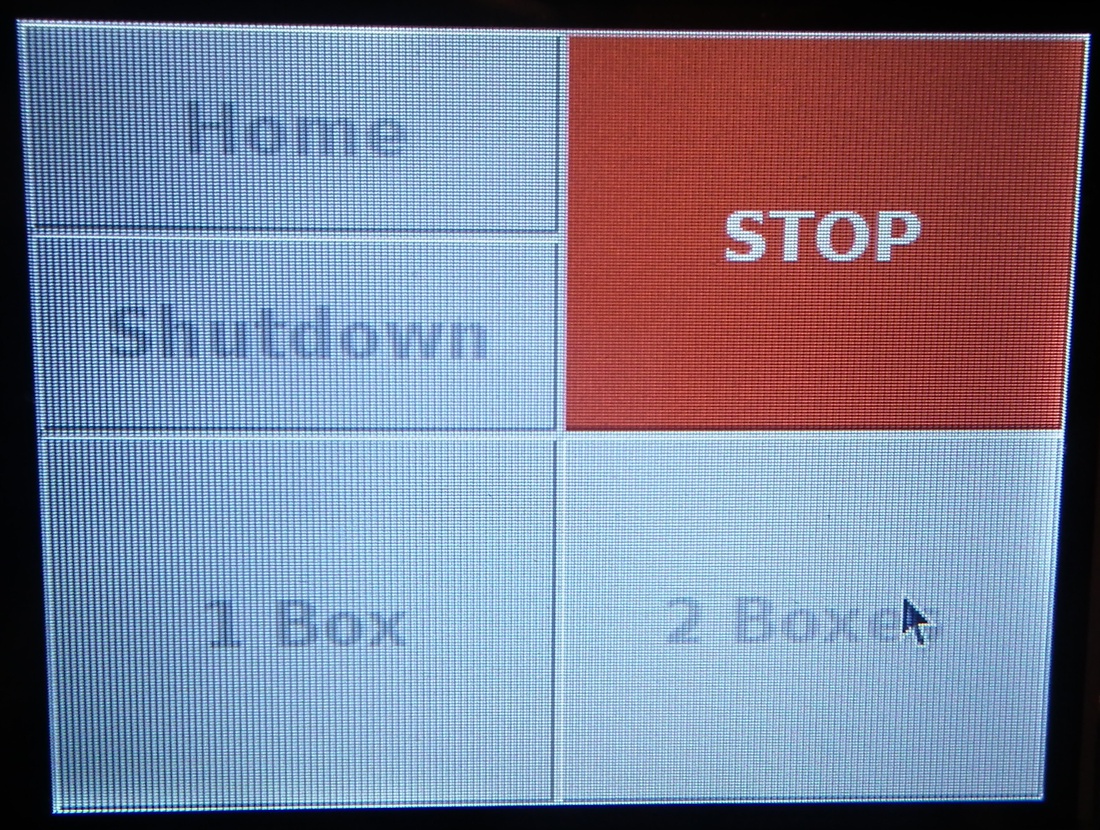
Figure 6.2: Appearance of touchscreen interface when a job is running.
6.3 Shutdown
- The raspberry pi should be shutdown using the shutdown button on the touchscreen.
- The Norprene tubing should be removed from the vat of fly food, then any food remaining in the tubing can be expelled by pressing and holding the prime button on the peristaltic pump. Ensure there is a receptacle under the nozzle to catch the expelled fly food. The Norprene tubing should be removed from the robot for cleaning/sterilization.
- All devices (raspberry pi, power supply unit for gShield and motors, and peristaltic pump) should be switched off.
- The robot can be wiped clean if necessary using a damp cloth. The platform can be removed for thorough cleaning.